| |
| 订购热线 |
| 上海:021-63515828 |
| 桂林:0773-3842910 |
| |
|
|
|
|
|
|
| 运动控制系列 |
| 型号: DICE-EWYD-2型二维运动控制实验平台 |
|
|
| 产品介绍: |
|
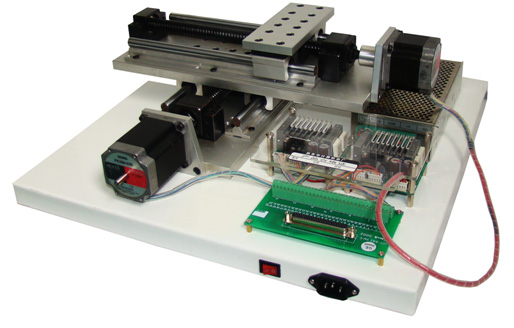
一、概述
本实验平台是集运动控制卡、单片机开发控制板、步进电机及驱动器、开关电源、XY控制平台及运动控制软件于一体的理想教学实验系统。XY控制台是一个采用滚珠丝杠传动的模块化十字工作台,可以实现平面内X、Y轴方向的运动控制,用于实现目标轨迹和动作。实验系统软件包括基于轴的控制、基于坐标系的控制、命令编辑和运行、数控代码编辑和运行、复杂运动轨迹控制。
二、技术性能
1、定位精度:0.4mm
2、X轴有效行程:230mm;Y轴有效行程:230mm;最大运动速度:20mm/s;最大运动加速度:1g
3、输入电源:220V±10%(50Hz)
4、工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m
5、装置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×15cm
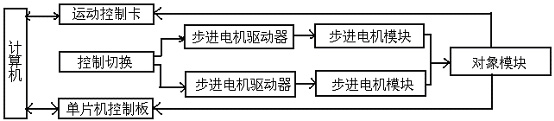
三、系统结构及组成
实验平台主要由步进电机控制系统和电脑桌两部分组成,结构框图如下图所示: |
|
|
|
系统结构框图 |
|
(1)对象模块
步进电机二个:采用二个2相步进电动机,分别为XY两个方向布置,X轴运动行程为230mm,Y轴运动行程为230mm。
(2)51单片机开发控制板
单片机开发控制板,主CPU为AT89S52,带下载接口(编程电缆,编程软件),所有接口资源引出,供用户使用。并配置相应控制开关按钮。
(3)运动控制卡一块
32位PCI总线,即插即用
所有输入、输出均采用光耦隔离,抗干扰性强
2轴伺服/步进电机控制,每轴可独立运动,互不影响
脉冲输出的频率误差小于0.1%
最大脉冲输出频率为2MHz
脉冲输出可用单脉冲(脉冲+方向)或双脉冲(脉冲+脉冲)方式
梯形加/减速
任意2轴直线插补
最大插补速度1MHz
运动中可以实时读出逻辑位置、实际位置、驱动速度
24路数字输入,12路输出
每轴两个限位输入,可设置成无效,作为通用输入使用
支持在一个系统中使用多达16个控制卡
支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系统
(4)步进电机驱动器二个
输出电流:最大电流为2A
输出方式:光光耦合器・开路集电极输出
(5)稳压直流电源 一个
输出电流:最大输出电流为5A
输出电压:24V
输出功率:120w
(6)运动控制卡接口板 一块
为运动控制卡提供接口端子,可根据自己的需要进行相应的接线,实现接线的灵活及开放性。
(7)实验平台信号接口板 一块
用以实现PLC和运动控制卡与实验平台的信号连接,在同一时刻只能一种控制起作用。
(8)脑桌一张(选配)
(9)计算机一台(用户自备)
用于安装单片机集成开发环境KEIL C、编程下载软件,主要完成程序的编写、修改、编译、软件仿真等功能,最后通过编程下载软件装载到单片机内部FLASH ROM中运行。还用于运行控制卡上位软件的开发、运行。
硬件配置:基本配置要求P4 3.OG以上,内存至少为256M,至少有一个USB接口、一个并行口、一个Rs232串口和一个空闲PCI插槽。操作系统:Windows XP(专业版)+SP2。
四、实验项目
基础实验
1、单片机的认识和操作实验
2、单片机集成开发环境KEIL C的认识实验
3、单片机在线编程软件的认识与使用
4、单片机基本编程练习实验
基于51单片机控制的系统性实验
6、基于51单片机控制的单轴实验
7、基于51单片机控制的两轴联动控制实验
8、基于51单片机控制的任意路线物料搬运实验
基于运动控制卡控制的系统性实验
9、基于运动控制卡控制的单轴实验
10、基于运动控制卡控制的两轴联动实验
11、基于运动控制卡控制的任意路线物料搬运实验
运动控制卡可用以下开发工具:
CBuilder Borland C++Bulider 6 工具开发的基本库函数示例程序及源代码
Dephi Borland Dephi 6 工具开发的基本库函数示例程序及源代码
Vb Microsoft Visual basic 工具开发的基本库函数示例程序及源代码
VC Microsoft Visual C++ 工具开发的基本库函数示例程序及源代码 |
|
|
|
|
|
|
